Kalau pada tulisan sebelumnya sudah saya tuliskan Prinsip program Motor Stepper | Wiring Motor Stepper serta Program Motor Stepper , maka dalam tulisan kali ini tentang kombinasi dari keduanya, kita akan merangkain dan memprogram motor stepper.
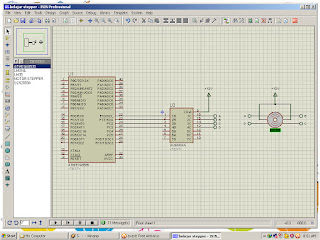
Buat rangkaian interface motor stepper seperti berikut atau bisa juga menggunakan fitur simulasi dari proteus.
Berikut program motor stepper menggunakan bahasa c:
for(i=0;i<50;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Untuk menggerakkan motor stepper sebesar 180 derajat
for(i=0;i<200;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Untuk menggerakkan motor stepper sebesar 360 derajat
for(i=0;i<400;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Berikut hasil simulasinya:

Buat rangkaian interface motor stepper seperti berikut atau bisa juga menggunakan fitur simulasi dari proteus.

Berikut program motor stepper menggunakan bahasa c:
for(i=0;i<50;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Untuk menggerakkan motor stepper sebesar 180 derajat
for(i=0;i<200;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Untuk menggerakkan motor stepper sebesar 360 derajat
for(i=0;i<400;i++)
{
PORTC=0x01;
delay_ms(50);
PORTC=0x02;
delay_ms(50);
PORTC=0x04;
delay_ms(50);
PORTC=0x08;
delay_ms(50);
}
Berikut hasil simulasinya:

mantap bang, ijin copy
BalasHapus