Pulse Width Modulation (PWM) merupakan sebuah pendekatan untuk mengendalikan torsi dan kecepatan motor arus searah. Tenaga yang disuplai ke motor adalah dalam bentuk sinyal gelombang kotak dari magnet konstan dengan merubah lebar pulsa atau duty cycle. Duty cycle adalah perbandingan antara lamanya waktu on terhadap waktu off dalam suatu periode waktu

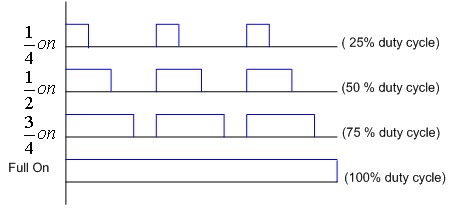
Grafik Duty Cycle
Penegndalian PWM ini biasanya sering dipakai dalam mengatur keluaran yang berbentuk analog, kecepatan motor misalnya atau kecerahan lampu.
Deskripsi proses
Kita menggunakan dua tombol, dimana tombol pertama digunakan untuk menaikkan duty cycle dan tombol kedua digunakan untuk menurunkan duty cycle.
Berikut Program Pengendalian PWM pada Mikrokontroler PIC 16F877 dengan MikroC
void InitMain() {
PORTC = 0;
TRISC = 0;
TRISA = 0b111111;
PORTA = 0;
PWM1_Init(1000);
}
int a;
void main() {
InitMain();
while(1)
{
a=25;
do
{
PWM1_Start();
PWM1_Set_Duty(a);
if(PORTA.F0=1)
{a=a+25;
}
if(PORTA.F1==1)
{a=a-25;
}
}
while(a <= 225);
}
}
Berikut hasil simulasi Pengendalian PWM pada Mikrokontroler PIC 16F877 dengan RealPicSimulator

Keyword: Belajar Mikrokontroler, Mikrokontroler PIC, PIC 16F877, simulasi mikrokontroler, PWM mikrokontroler, belajar PWM, Pulse Width Modulation, Mikro C, belajar Mikro C, program mikrokontroler, belajar program
Baca Juga:
Tutorial PIC Simulator
Belajar Mikrokontroler PIC 16F788
Blogilicious Kito Palembang
Rangkaian Sensor Suhu Sederhana
Mengukur Kecepatan dengan Rotary Encoder
masih bingung , tapi thanks info nya :D
BalasHapuscome and comment
Hmm. kalau masih bingung, dibaca ulang y,
BalasHapusUntuk melengkapi informasi di atas bisa dilihat pada site :
BalasHapushttp://repository.gunadarma.ac.id/bitstream/123456789/877/1/10407982.pdf